
Rover X1
Entrega
Póngase en contacto con el Servicio de Atención al Cliente para obtener información detallada sobre la entrega.
Aduanas e Impuestos
Los clientes son responsables de todos los aranceles, impuestos y tasas de despacho de importación aplicables de acuerdo con las regulaciones locales.
Rover X1
Product Description
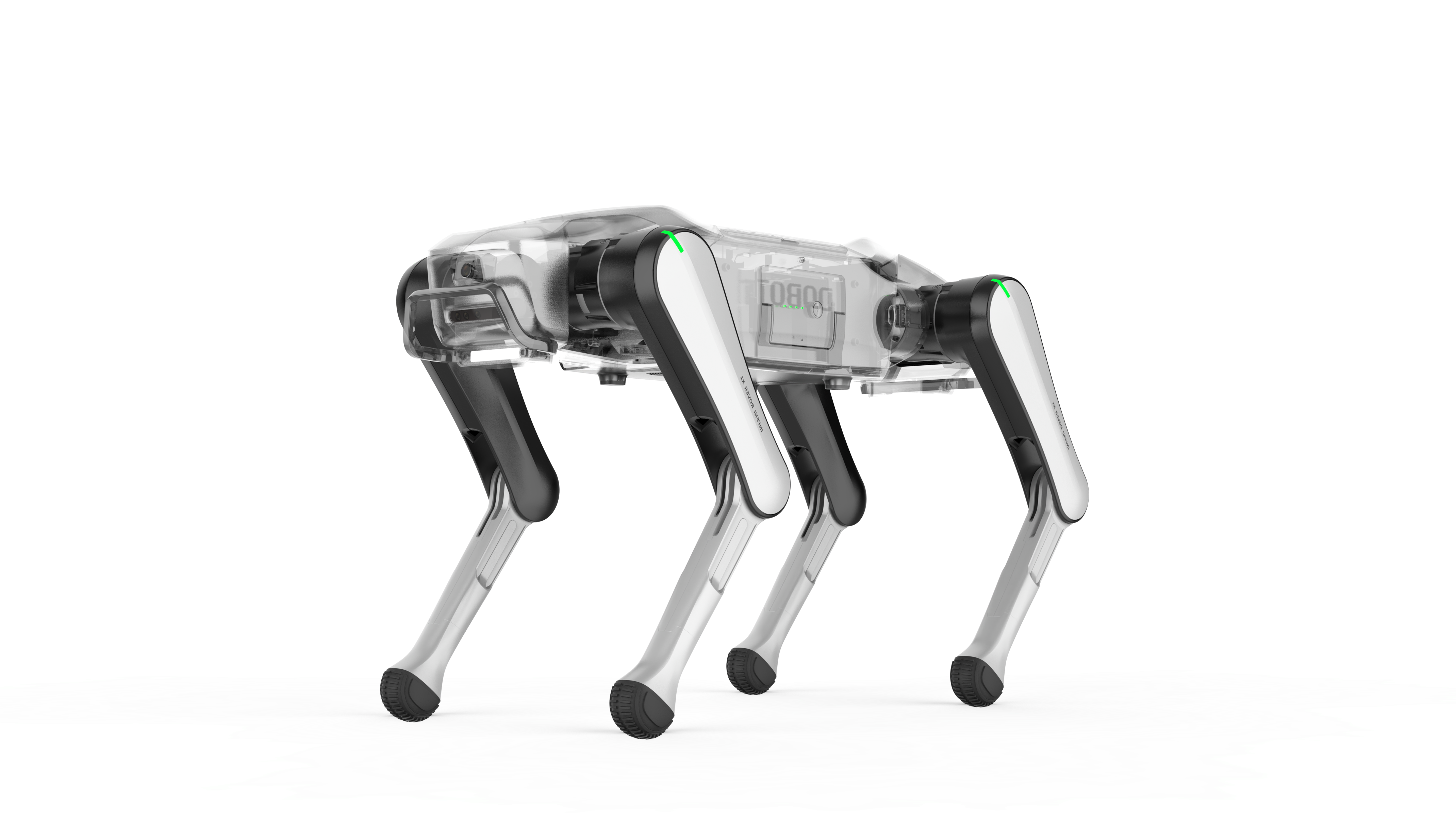
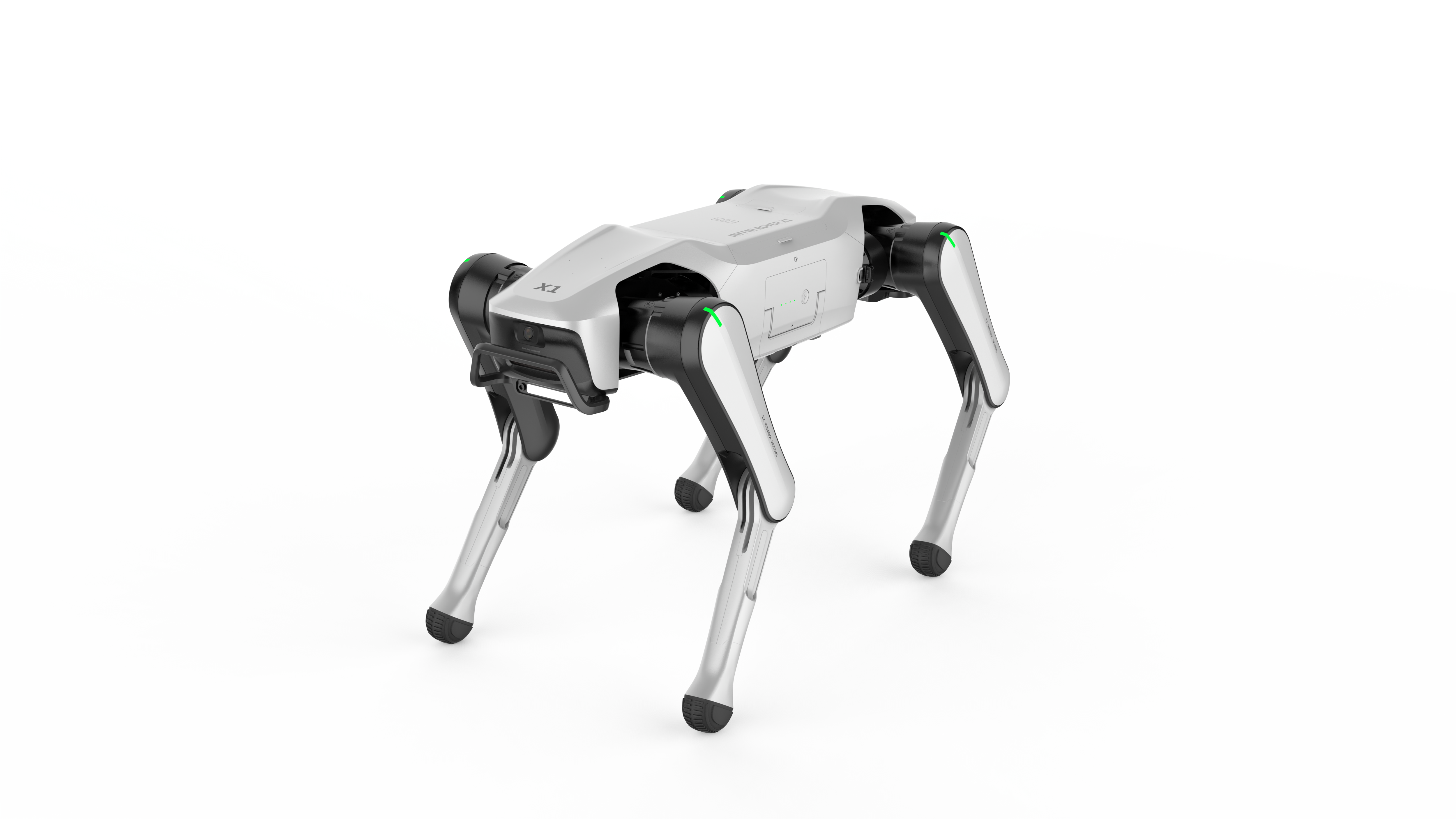
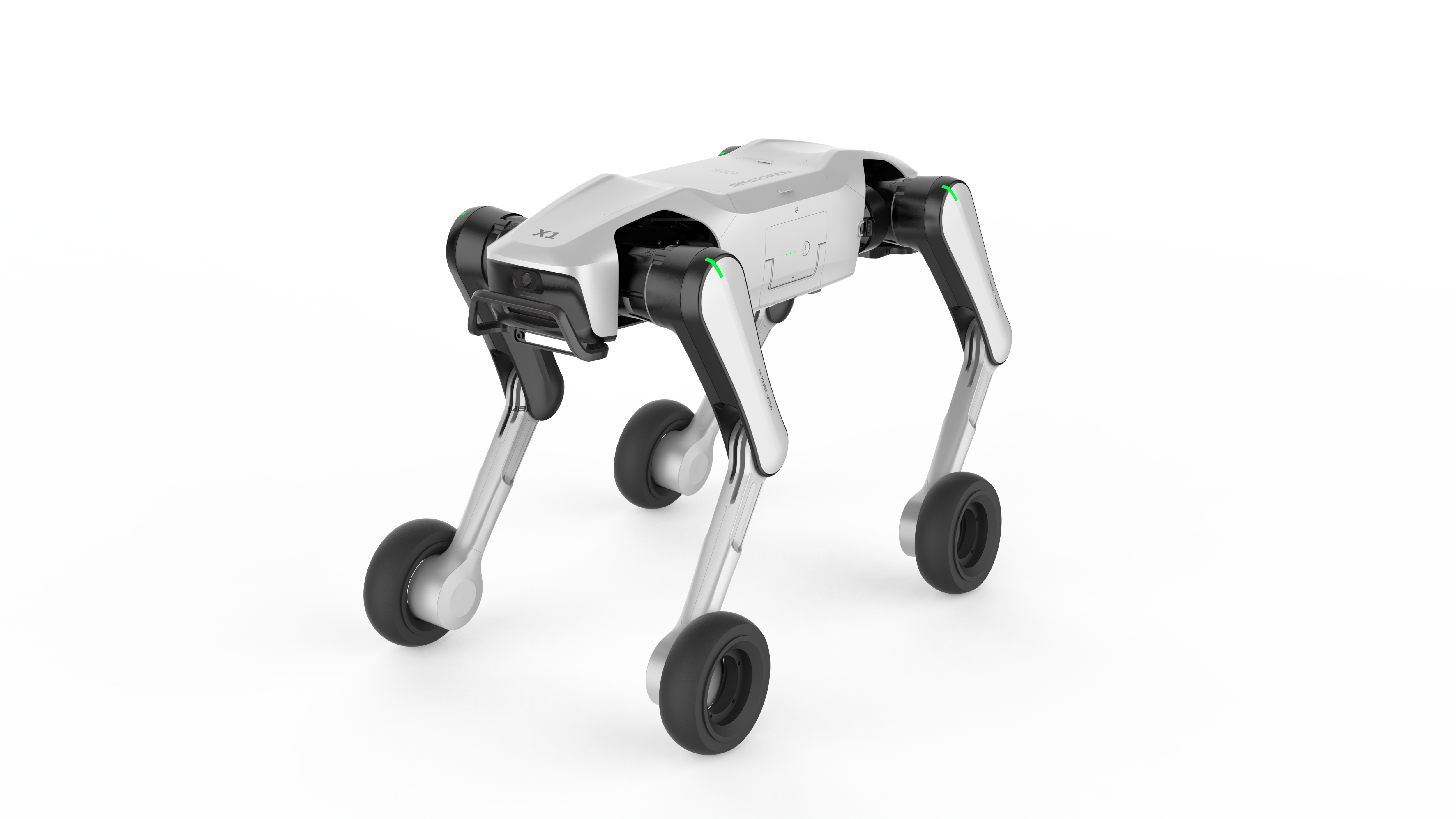
Perro Robot Dobot Rover X1
Perro robot híbrido con ruedas y patas con visión de IA, velocidad de 1,8 m/s y plataforma programable
El Dobot Rover X1 es un robot cuadrúpedo inteligente diseñado para la movilidad, la interacción y el desarrollo robótico. Con una estructura híbrida de rueda y pata, combina un movimiento eficiente con ruedas y una locomoción adaptativa con patas, lo que permite su funcionamiento en diversos entornos.
Equipado con percepción de doble visión, navegación autónoma y una plataforma de desarrollo abierta, el Rover X1 permite la elaboración de mapas en tiempo real, el seguimiento de objetos y comportamientos programables para la investigación, la educación y aplicaciones del mundo real.
Características y beneficios clave
-
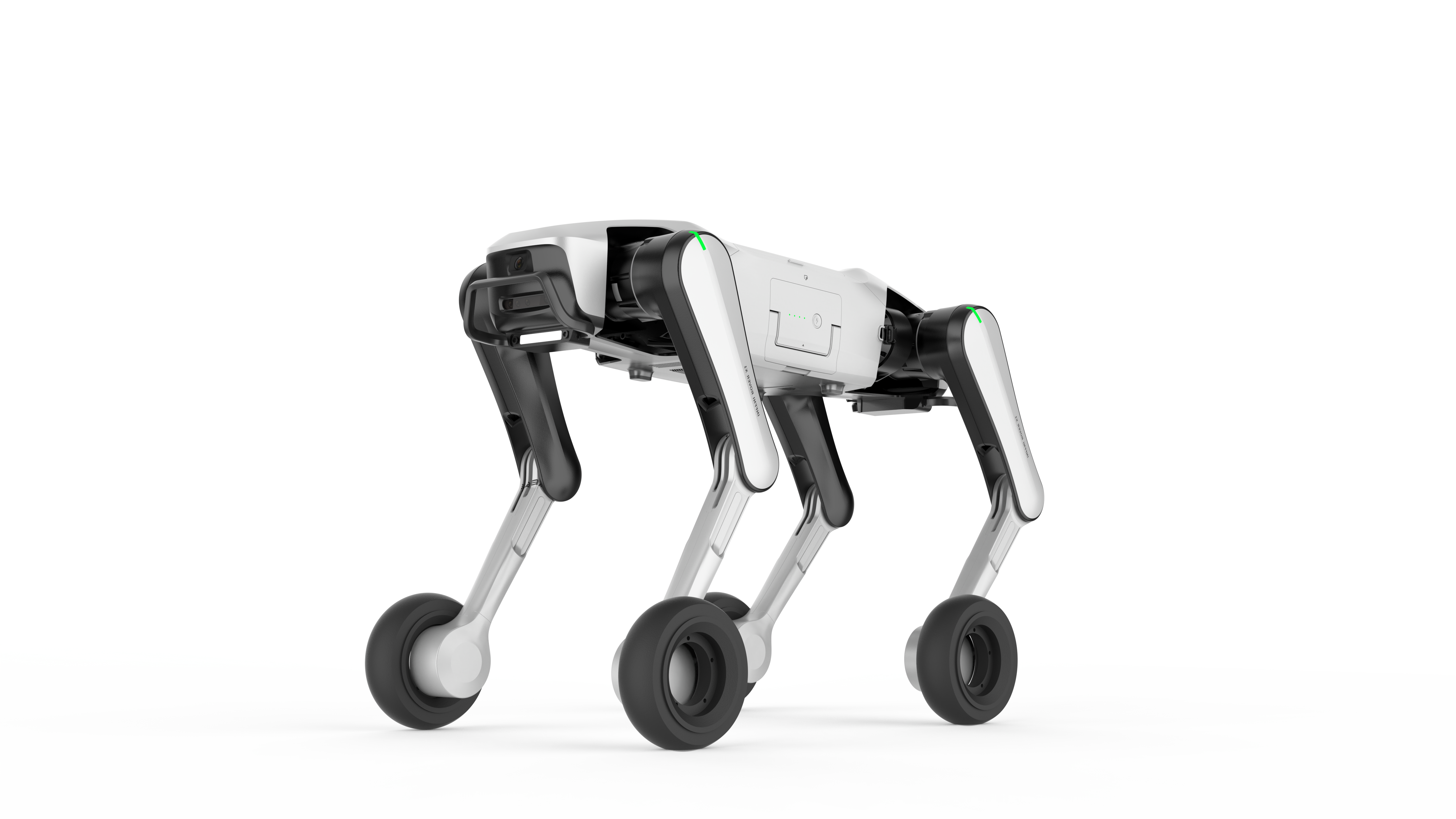
Sistema de movilidad híbrido de rueda y pata
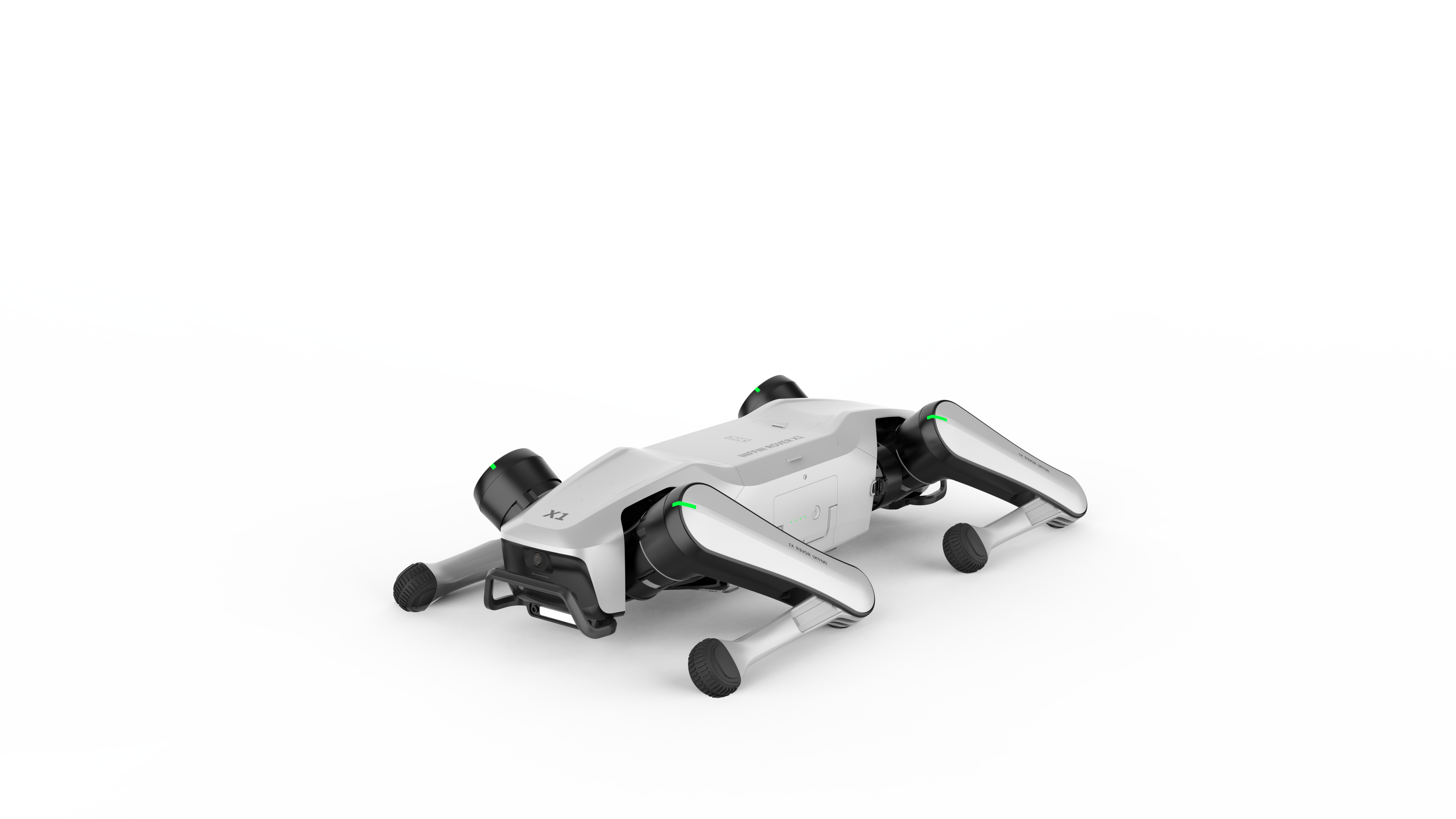
Soporta múltiples movimientos que incluyen trote, caminata, rodadura, subir escaleras, bailar y levantar patas para un movimiento versátil.
-
Rendimiento de alta velocidad
Velocidad máxima de 1,8 m/s (aprox. 6,5 km/h) para una movilidad rápida y eficiente.
-
Sistema de alto grado de libertad
Cuenta con 12+ DOF totales con 3 articulaciones + 1 rueda por pata para un control de movimiento flexible.
-
Capacidad de carga útil
Soporta una carga útil estándar de 3 kg y una capacidad de carga máxima de hasta 7 kg.
-
Sistema de percepción avanzado
Cámaras duales de 1080p a 30 fps, visión omnidireccional e IMU de 6 ejes para la detección del entorno y el equilibrio.
-
Navegación autónoma y SLAM
Admite la elaboración de mapas en tiempo real, seguimiento automático y detección de obstáculos con frenado hacia adelante y conciencia omnidireccional.
-
Plataforma de desarrollo abierto
Compatible con la integración ROS, acceso SDK/API, simulación Gazebo e Isaac Sim, lo que permite un desarrollo robótico avanzado.
-
Múltiples modos de control
Incluye control remoto, control por aplicación Wi-Fi, control por voz, seguimiento automático y modos de asistencia con correa.
-
Conectividad flexible
Compatible con Wi-Fi (2,4/5 GHz), Bluetooth 5.0, actualizaciones OTA y 4G opcional.
-
Opciones de tiempo de ejecución extendido
Tiempo de ejecución de 90 a 180 minutos con opciones de batería:- Estándar: 88 Wh (4000 mAh)
- Largo alcance: ~177 Wh (8000 mAh)
-
Opciones de movilidad configurables
Disponible con configuraciones de patas con punta o patas con ruedas para adaptarse a los requisitos del terreno.
Especificaciones técnicas
| Categoría | Especificación |
|---|---|
| Dimensiones | 820 × 480 × 180 mm |
| Peso | 15,5 kg |
| Número de patas | 4 |
| Velocidad máxima | 1,8 m/s (≈6,5 km/h) |
| Ángulo máximo de ascenso | 30° |
| Altura máxima de escalón | 16 cm |
| Terreno | Pisos duros, alfombra, césped, grava, pendientes moderadas |
| Actuación | Motores BLDC (ruedas de accionamiento directo + juntas de caja de cambios) |
| Cámaras | Dual 1080p a 30 fps (frontal y trasera) |
| IMU | 6 ejes |
| GPS | Sí |
| Comunicación | Wi-Fi, Bluetooth 5.0, 4G opcional |
| Batería | 88 Wh / ~177 Wh |
| Tiempo de ejecución | 90–180 minutos |
| Tiempo de carga | 120 minutos |
| Temperatura de funcionamiento | 0°C a 45°C |
| Certificaciones | CE, FCC |
-
Aplicaciones
Patrulla de seguridad en el hogar, fotografía móvil, transporte de carga, educación STEM y compañía.
-
Opciones de paquete
Las configuraciones disponibles incluyen:- Patas con punta o patas con ruedas
- Batería estándar o batería de largo alcance
¿Interesado en la personalización?
¡Contáctanos para accesorios y construye tus robots personalizados!