
Dobot
Rover X1
Product Description
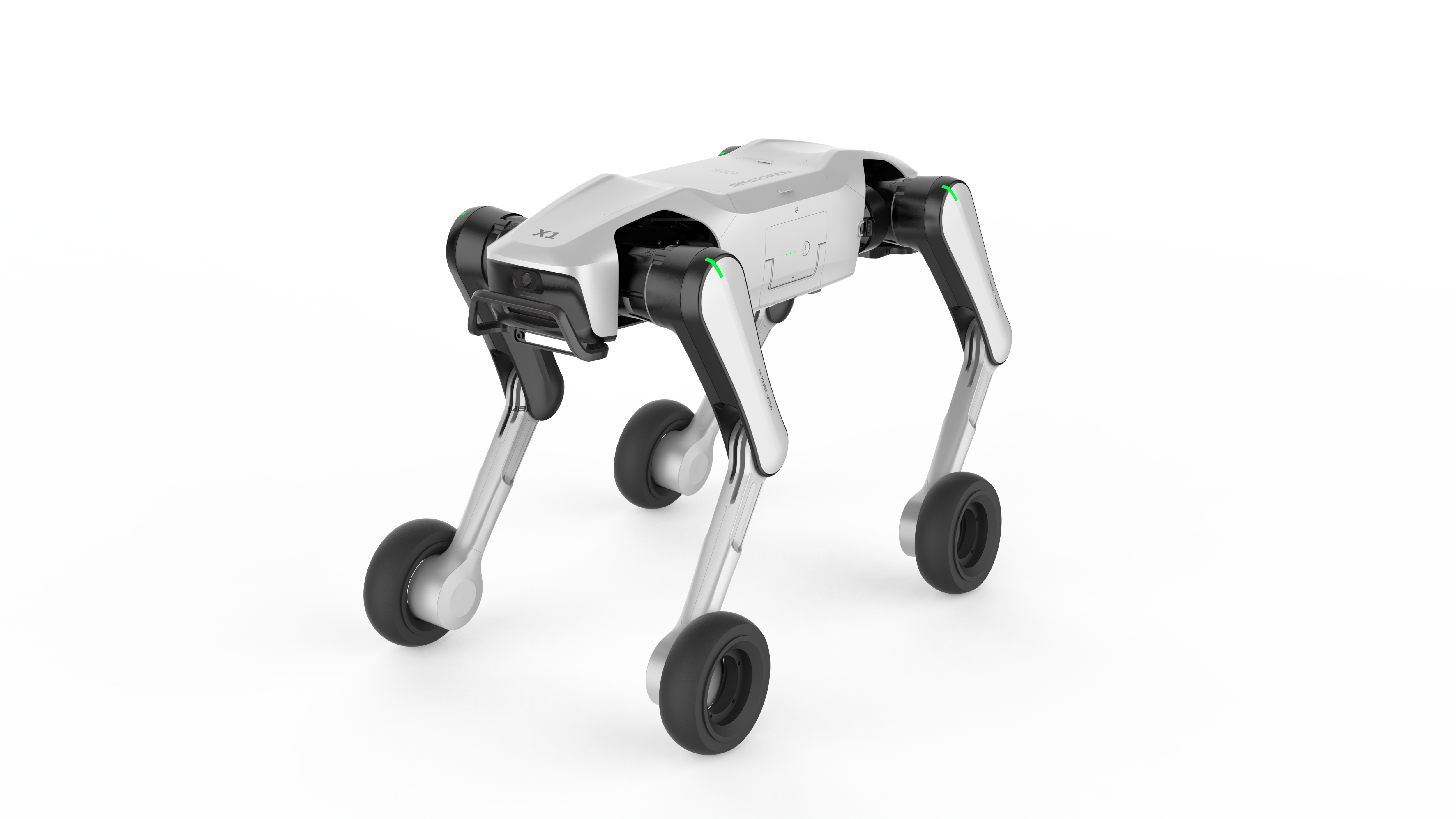
Dobot Rover X1 Robot Dog
Hybrid Wheel-Leg Robot Dog with AI Vision, 1.8 m/s Speed & Programmable Platform
The Dobot Rover X1 is an intelligent quadruped robot designed for mobility, interaction, and robotics development. Featuring a hybrid wheel-leg structure, it combines efficient wheeled movement with adaptive legged locomotion, enabling operation across diverse environments.
Equipped with dual-vision perception, autonomous navigation, and an open development platform, the Rover X1 supports real-time mapping, subject tracking, and programmable behaviors for research, education, and real-world applications.
Key Features & Benefits
-
Hybrid Wheel-Leg Mobility System
Supports multiple gaits including trot, walk, wheeled rolling, stair-climbing, dancing, and paw-raising for versatile movement.
-
High-Speed Performance
Maximum speed of 1.8 m/s (approx. 6.5 km/h) for fast and efficient mobility.
-
High Degree of Freedom System
Features 12+ total DOF with 3 joints + 1 wheel per leg for flexible motion control.
-
Payload Capability
Supports 3 kg standard payload and up to 7 kg maximum carrying capacity.
-
Advanced Perception System
Dual 1080p @ 30fps cameras, omnidirectional vision, and 6-axis IMU for environment sensing and balance.
-
Autonomous Navigation & SLAM
Supports real-time mapping, auto-follow, and obstacle detection with forward braking and omnidirectional awareness.
-
Open Development Platform
Supports ROS integration, SDK/API access, Gazebo and Isaac Sim simulation, enabling advanced robotics development.
-
Multiple Control Modes
Includes remote control, Wi-Fi app control, voice control, auto-follow, and leash-assist modes.
-
Flexible Connectivity
Supports Wi-Fi (2.4/5 GHz), Bluetooth 5.0, OTA updates, and optional 4G.
-
Extended Runtime Options
Runtime of 90–180 minutes with battery options:- Standard: 88 Wh (4000 mAh)
- Long-range: ~177 Wh (8000 mAh)
-
Configurable Mobility Options
Available with point feet or wheel feet configurations to match terrain requirements.
-
Applications
Home security patrol, mobile photography, load carrying, STEM education, and companionship.
-
Package Options
Available configurations include:- Point feet or wheel feet
- Standard battery or long-range battery
Technical Specifications
Dimensions
820 × 480 × 180 mm
Weight
15.5 kg
Number of Legs
4
Max Speed
1.8 m/s (≈6.5 km/h)
Max Climb Angle
30°
Max Step Height
16 cm
Terrain
Hard floors, carpet, grass, gravel, moderate inclines
Actuation
BLDC motors (Direct-drive wheels + gearbox joints)
Cameras
Dual 1080p @ 30fps (front & rear)
IMU
6-axis
GPS
Yes
Communication
Wi-Fi, Bluetooth 5.0, optional 4G
Battery
88 Wh / ~177 Wh
Runtime
90–180 minutes
Charging Time
120 minutes
Operating Temperature
0°C to 45°C
Certifications
CE, FCC
Delivery
Please refer to Shipping and Delivery policy, or Contact Customer Service for detailed delivery info.
Rover X1
Product Description
Dobot Rover X1 Robot Dog
Hybrid Wheel-Leg Robot Dog with AI Vision, 1.8 m/s Speed & Programmable Platform
The Dobot Rover X1 is an intelligent quadruped robot designed for mobility, interaction, and robotics development. Featuring a hybrid wheel-leg structure, it combines efficient wheeled movement with adaptive legged locomotion, enabling operation across diverse environments.
Equipped with dual-vision perception, autonomous navigation, and an open development platform, the Rover X1 supports real-time mapping, subject tracking, and programmable behaviors for research, education, and real-world applications.
Key Features & Benefits
-
Hybrid Wheel-Leg Mobility System
Supports multiple gaits including trot, walk, wheeled rolling, stair-climbing, dancing, and paw-raising for versatile movement.
-
High-Speed Performance
Maximum speed of 1.8 m/s (approx. 6.5 km/h) for fast and efficient mobility.
-
High Degree of Freedom System
Features 12+ total DOF with 3 joints + 1 wheel per leg for flexible motion control.
-
Payload Capability
Supports 3 kg standard payload and up to 7 kg maximum carrying capacity.
-
Advanced Perception System
Dual 1080p @ 30fps cameras, omnidirectional vision, and 6-axis IMU for environment sensing and balance.
-
Autonomous Navigation & SLAM
Supports real-time mapping, auto-follow, and obstacle detection with forward braking and omnidirectional awareness.
-
Open Development Platform
Supports ROS integration, SDK/API access, Gazebo and Isaac Sim simulation, enabling advanced robotics development.
-
Multiple Control Modes
Includes remote control, Wi-Fi app control, voice control, auto-follow, and leash-assist modes.
-
Flexible Connectivity
Supports Wi-Fi (2.4/5 GHz), Bluetooth 5.0, OTA updates, and optional 4G.
-
Extended Runtime Options
Runtime of 90–180 minutes with battery options:- Standard: 88 Wh (4000 mAh)
- Long-range: ~177 Wh (8000 mAh)
-
Configurable Mobility Options
Available with point feet or wheel feet configurations to match terrain requirements.
-
Applications
Home security patrol, mobile photography, load carrying, STEM education, and companionship.
-
Package Options
Available configurations include:- Point feet or wheel feet
- Standard battery or long-range battery
Technical Specifications
Dimensions
820 × 480 × 180 mm
Weight
15.5 kg
Number of Legs
4
Max Speed
1.8 m/s (≈6.5 km/h)
Max Climb Angle
30°
Max Step Height
16 cm
Terrain
Hard floors, carpet, grass, gravel, moderate inclines
Actuation
BLDC motors (Direct-drive wheels + gearbox joints)
Cameras
Dual 1080p @ 30fps (front & rear)
IMU
6-axis
GPS
Yes
Communication
Wi-Fi, Bluetooth 5.0, optional 4G
Battery
88 Wh / ~177 Wh
Runtime
90–180 minutes
Charging Time
120 minutes
Operating Temperature
0°C to 45°C
Certifications
CE, FCC
- Choosing a selection results in a full page refresh.
- Opens in a new window.